- Published on
Reinforcement_Learning
Shusen Wang
基础
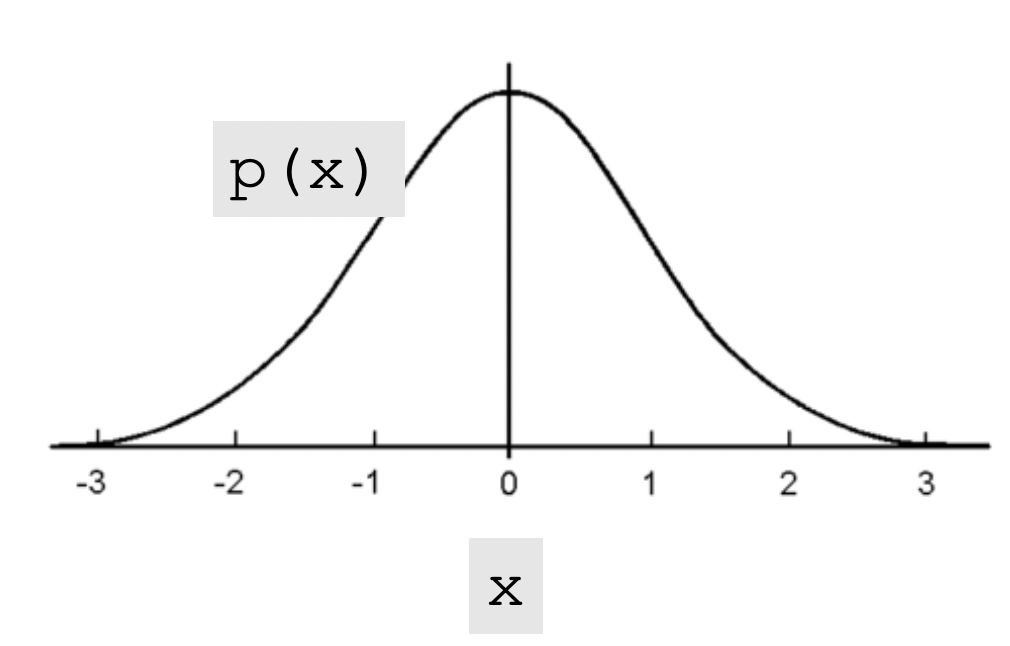
Probalility Density Function-PDF
高斯分布:$p(x)=\frac{1}{\sqrt{2 \pi \sigma^2}} \exp \left(-\frac{(x-\mu)^2}{2 \sigma^2}\right)$
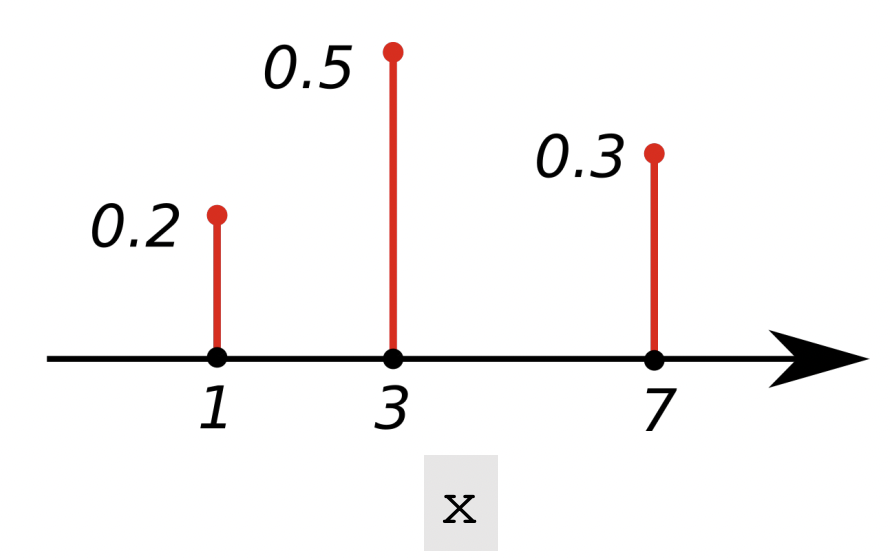
离散分布
PDF:$p(1)=0.2, p(3)=0.5, p(7)=0.3$
对于连续分布:
$\int_x p(x) d x=1$
对于离散分布:
$\sum_{x \in x} p(x)=1$
Expectation
对于随机变量X,
连续分布的期望为:$\mathbb{E}[f(X)]=\int_x p(x) \cdot f(x) d x$
离散分布的期望为:$\mathbb{E}[f(X)]=\sum_{x \in X} p(x) \cdot f(x)$
术语
状态: state 行为: action 策略: policy 奖赏: reward
状态转移:state transition

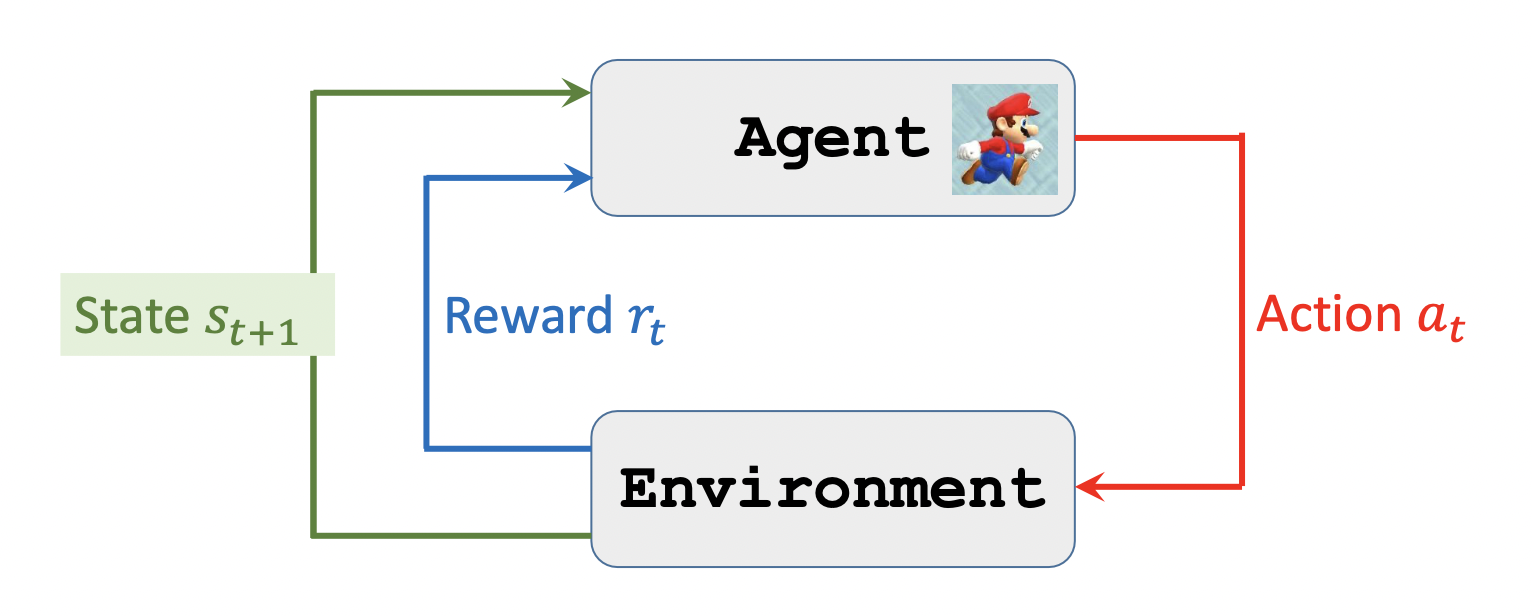
对于马里奥游戏 :
$s$ state: 游戏中的一帧图片。
$a$action: 马里奥可以左,右,跳三个动作。 所以$a \in{$ left, right, up $}$
$\boldsymbol{\pi}$policy function:策略函数,根据当前的state选择最好的action。$\pi(a \mid s)=\mathbb{P}(A=a \mid S=s)$
$R$Reward:吃一个金币,或赢得游戏。赢得游戏的奖赏大于吃一个金币。触碰到Goomba则奖赏为负数,上述所有情况都没发生则奖赏为0.
state transition:

随机性
策略函数是一个概率函数。 所以每次的action都是随机的。
$A \sim \pi(\cdot \mid s)$
old state 根据action转变到new state。$S^{\prime} \sim p(\cdot \mid s, a)$状态也是随机的。
定义
交互行为:
根据当前state和policy function选择一个action
action会产生一个新的state和Reward
一个好的policy function可以产生更多的奖励。根据奖励可以指导policy function。
Definition : Return 累计未来奖励(cumulative future reward)。
$U_t=R_t+R_{t+1}+R_{t+2}+R_{t+3}+\cdots$
未来奖励权重要低于当下奖励的权重
Definition:Discounted return
$\gamma$:discount factor(超参数)
$U_t=R_t+\gamma R_{t+1}+\gamma^2 R_{t+2}+\gamma^3 R_{t+3}+\cdots$随机的,R依赖于s,a。 s,a是随机的。
Definition: Action-Value Function 为动作A打分。当前动作好不好
$Q_\pi\left(s_t, a_t\right)=\mathbb{E}\left[U_t \mid S_t=s_t, A_t=a_t\right]$条件期望
$U_t$依赖于$S_t,S_{t+1},...,S_n$和$A_t,A_{t+1},...,A_n$
$s_t,a_t$是观测变量,$s_{t+1},...,S_n$和$A_{t+1},...,A_n$是随机变量
Actions are random:$\mathbb{P}[A=a \mid S=s]=\pi(a \mid s)$ policy function
State are random:$\mathbb{P}\left[S^{\prime}=s^{\prime} \mid S=s, A=a\right]=p\left(s^{\prime} \mid s, a\right)$ state function
Ut也是随机变量。
可以对$U_t$这个随机变量求期望。将里面的随机性积掉,可以得到一个实数。比如我们知道抛硬币的正面朝上的概率是0.5, 正面朝上记为1,反面为0,则期望为0.5。
除了$s_t,a_t$未来的动作状态都被积掉了,$s_t,a_t$被作为观测到的数值替代而不是随机变量。Q还与policy function有关,如果policy函数不一样则$Q_\pi$也不一样,已知policy函数,$Q_\pi$就会为当前状态下所有的a打分。
Definition: Optimal action-value function
$Q^{\star}\left(s_t, a_t\right)=\max \pi Q\pi\left(s_t, a_t\right)$去掉policy function。最优动作价值函数
Definition:State-value function
$V_\pi\left(s_t\right)=\mathbb{E}A\left[Q\pi\left(s_t, A\right)\right]=\sum_a \pi\left(a \mid s_t\right) \cdot Q_\pi\left(s_t, a\right)$当Aciton是离散的时候。
描述当前状态S好不好。
可以把动作A作为随机变量,对A求期望 A的概率密度函数是$\underline{A} \sim \pi\left(\cdot \mid s_t\right)$.,把A消掉。求期望得到的$V_\pi$只和$\pi$和s有关。如果$\pi$是固定的,那么状态越好,$V_\pi$的值越大。
如果$\pi$越好,则$\mathbb{E}S\left[V\pi(S)\right]$ $V_\pi(S)$的期望就越大。