- Published on
HMM_参数估计
HMM基本概念
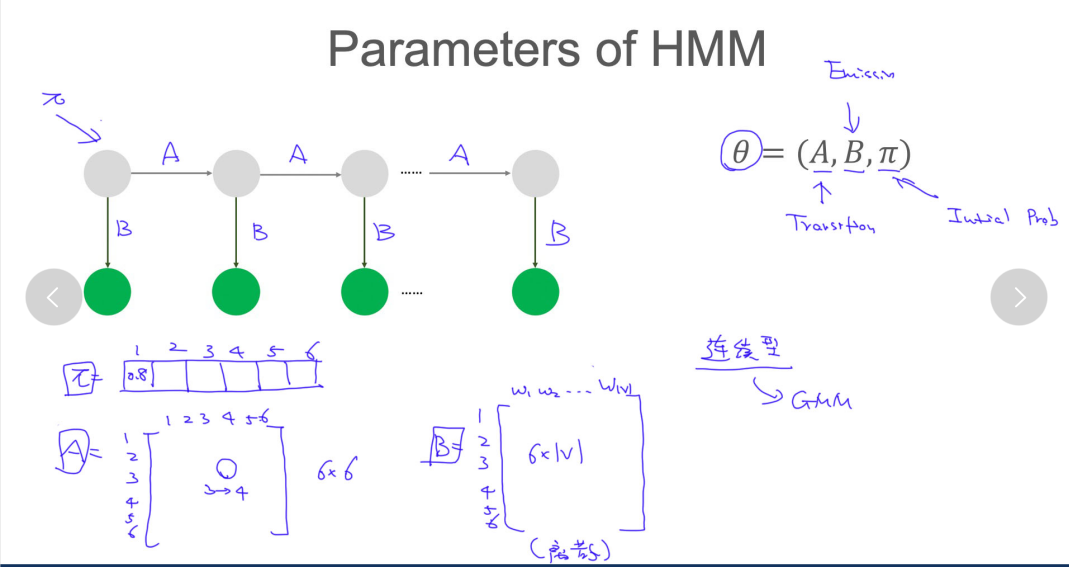
参数
Two Major Tasks
- 给定模型的参数,找到最适合的z inference
- 估计模型的参数 $\theta$ parameter estimator
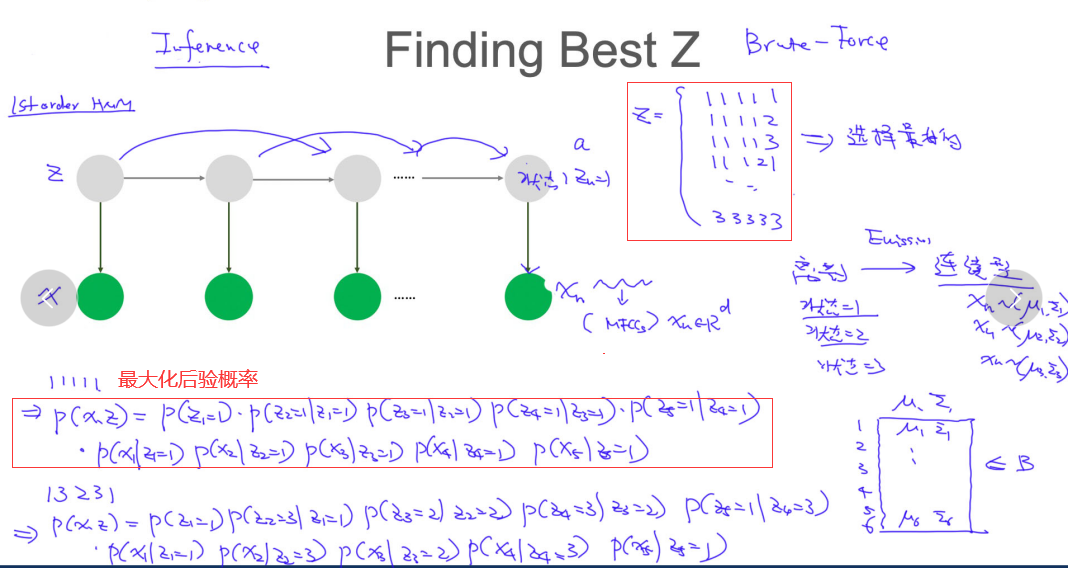
Inference
使用暴力的求解方法:
找到所有z的组合,然后求后验概率p(z|x)
P(z|x)后验概率,这里求的是P(z,x),原理上是一样的
P(z|x) = P(z,x) / P(x) P(x)是归一化项,都是一样的,而且计算P(x)会很难,这里我们只需要找到最大的后验概率,所以只需要求P(z|x)
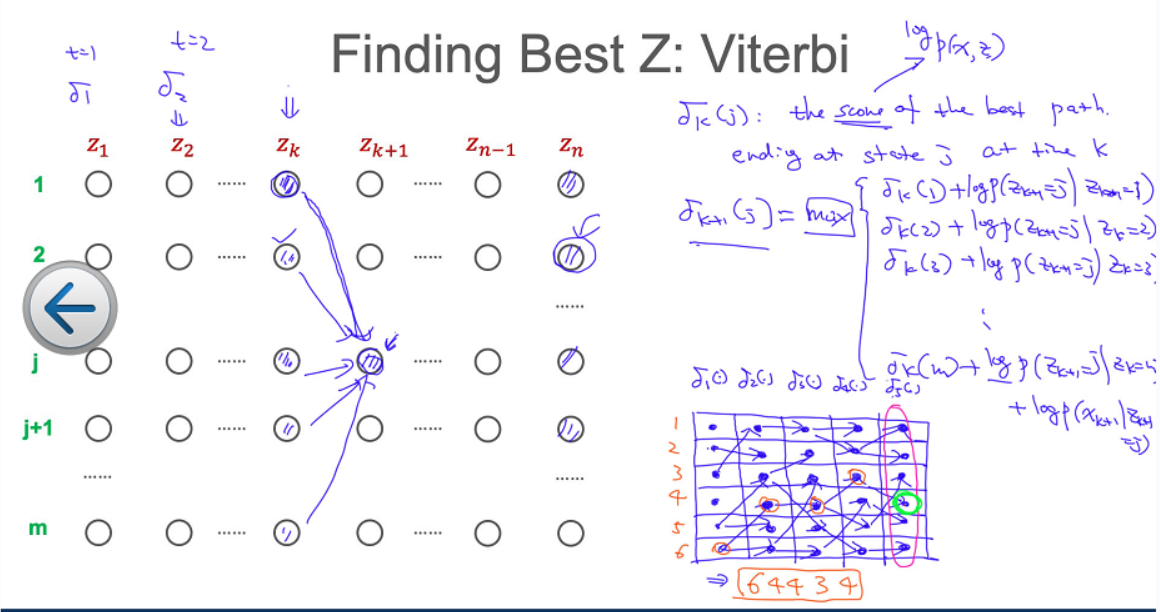
动态规化算法
Viterbi算法。见黄皮笔记本2切
参数估计
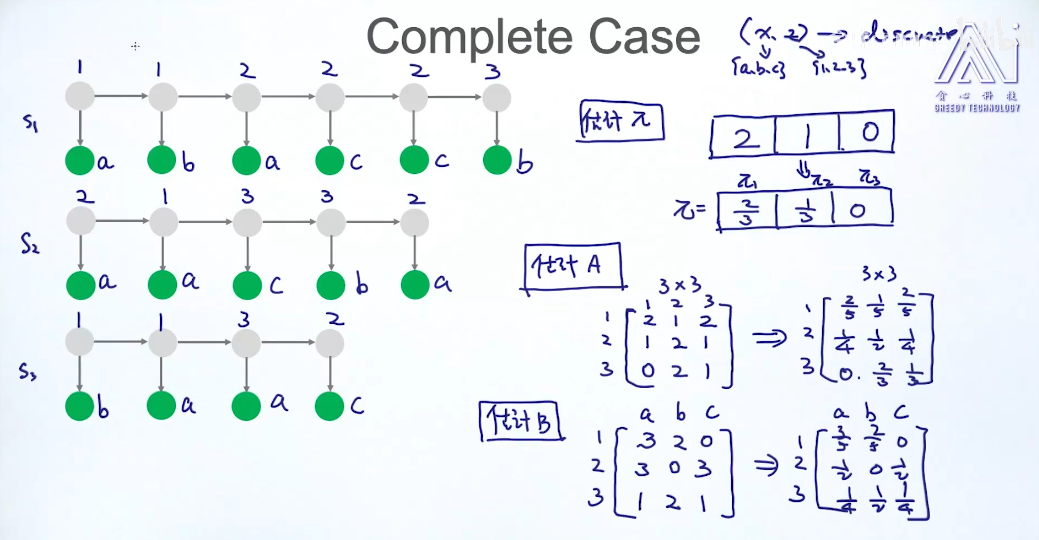
Complete Case
已知 x,z 估计参数
z三个状态: 1 2 3
估计A:归一化 按照每一行
Incomplete Case
z的状态数目是提前定义好的,超参数
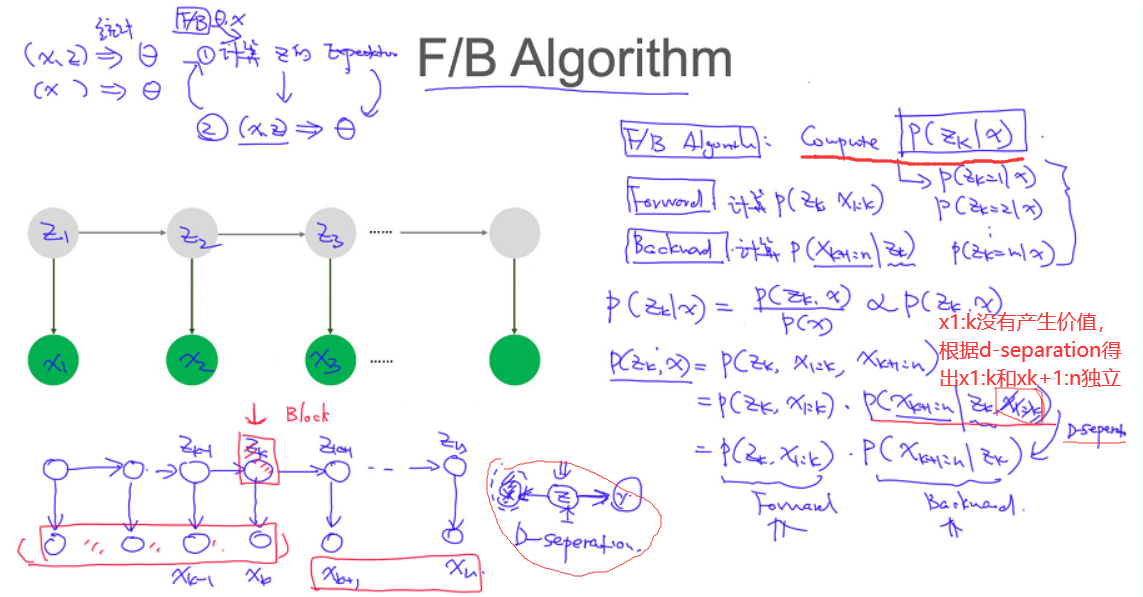
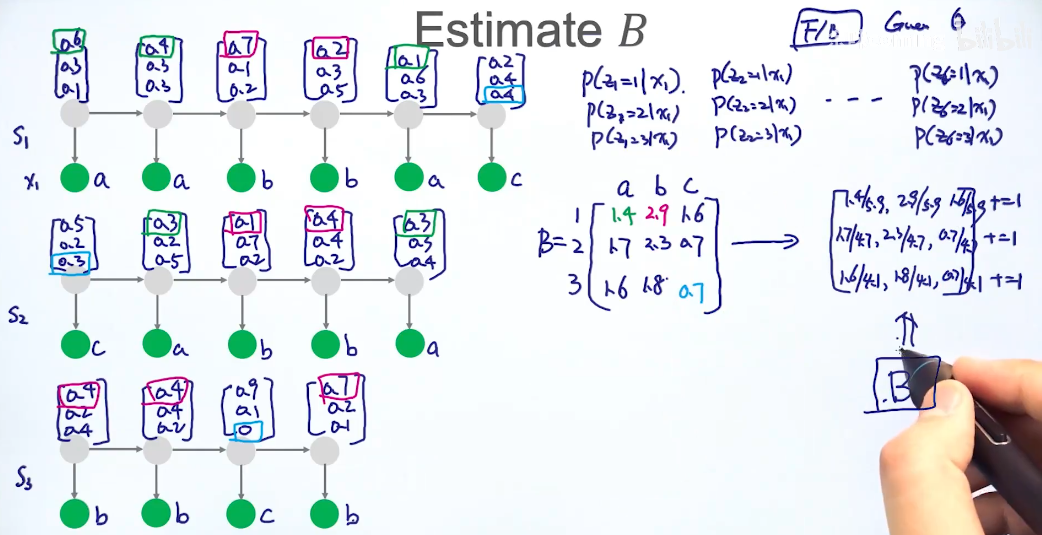
F/B算法,计算 $p(z_k|x)$,可以求出z的期望
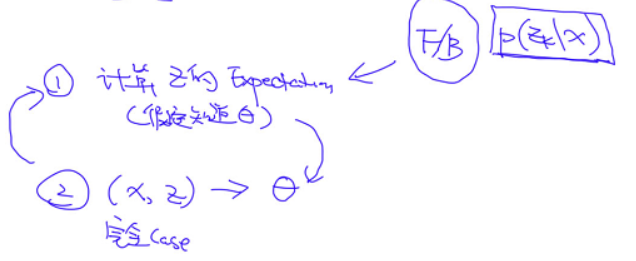
EM算法
1. 计算z的exception,通过F/B算法 P(z_K|x)
2. 通过(x,z) 求 theta,complete case
FB算法 F,B动态规划概率公式问题
- 首先根据动态规划算法的公式要求,写出等式
- 判断左边变量是否在右边出现过
- 对于未出现的变量,通过概率边缘化添加
- 通过P(AB) = P(A|B)P(B)来进行公式求解
- 最终解式要往$z_k$,$x_k$,$x_k+1,z_k+1$上凑,从而使用发射矩阵,和转移矩阵表示结果。(给定$x和\theta$)
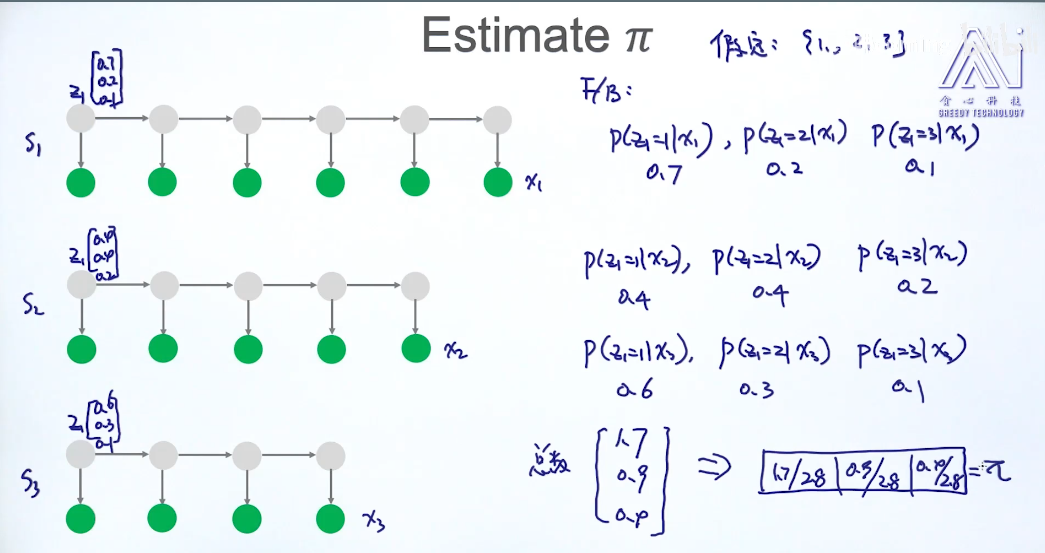
估计PI
我们通关F/B算法可以求出$P(z_k|x)$
假设有三个状态:我们可以计算
针对不同的样本x: $P(z_1|x),P(z_2|x),P(z_3|x)$ 看作为次数,将所有的次数相加,再归一化得到概率。
估计B
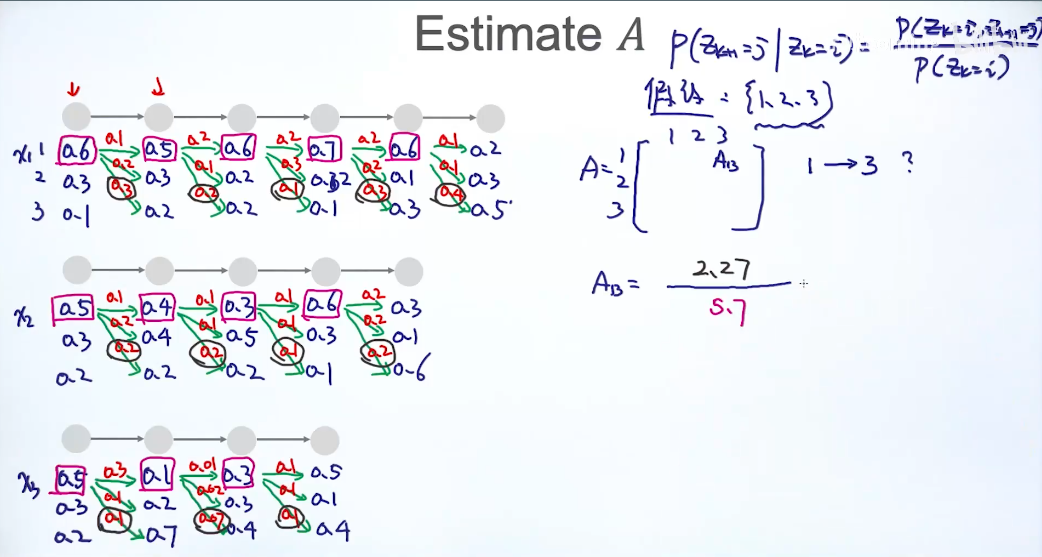
估计A
计算A稍微复杂,A是一个状态转移矩阵

求解会涉及到条件概率,通过对公式的转化,最后需要求解一个联合概率。

estimate A 具体步骤